PRA
Ultrazvukový sensor HC-SR04
Cíle lekce
- Pochopit princip ultrazvukového měření vzdálenosti
- Vytvořit funkční zapojení a program pro měření vzdálenosti se senzorem HC-SR04
Hlavní parametry senzoru:
| Parametr | Hodnota |
|---|---|
| Napájecí napětí | 5V |
| Proudový odběr | ~15 mA |
| Frekvence ultrazvuku | 40 kHz |
| Měřicí rozsah | 2 – 400 cm |
| Přesnost | ±3 mm |
| Úhel detekce | ~15° |
| Rozhraní | 2 digitální piny (Trig, Echo) |
Princip senzoru
HC-SR04 měří vzdálenost pomocí ultrazvuku. Po impulsu na pinu TRIG vyšle krátký ultrazvukový signál (40 kHz) a čeká na jeho odraz od překážky. Od doby odeslání signálu až do chvíle, kdy se odražený signál vrátí, pin je pin ECHO v log. 1. V okamžiku kdy je detekován odraz, nastaví se do log. 0. Z délky tohoto impulzu se podle rychlosti zvuku spočítá vzdálenost.
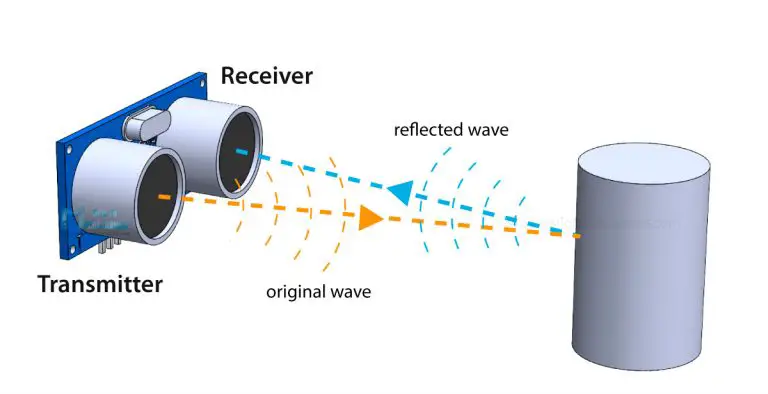
Zdroj obrázku: https://howtomechatronics.com/tutorials/arduino/ultrasonic-sensor-hc-sr04/
Komunikace čidla s Arduinem
Kromě +5V napájení a GND musíme čidlo připojit ke dvěma libovolným digitálním pinům Arduina. Pin Trig slouží ke spuštění měření (vyslání ultrazvukového pulzu), musíme jej tedy v Arduinu nastavit jako výstup. Pin Echo je výstup senzoru (tedy z pohledu Arduina vstup), na kterém senzor generuje puls, jehož délka odpovídá době od vyslání signálu do návratu odražené vlny.
Průběh signálu na pinech Trig a Echo:
Zdroj obrázku: https://pico.implrust.com/ultrasonic/how-it-works.html
Ukázka echo signálu na osciloskopu
Zdroj obrázku: https://electronoobs.com/eng_arduino_tut36.php
Úkoly
- Připojte k Arduinu ultrazvukový senzor. Měřte délku pulzu na pinu Echo a tuto hodnotu posílejte na Serial monitor.
- Upravte program tak, aby délku pulzu přepočítal na zdálenost v centimetrech a tu opět posílejte na Serial monitor.
- Přidejte navíc LCD displej a naměřenou hodnotu na něm zobrazujte. Připojte Arduino na powerbanku a zkuste změřit i větší vzdálenosti v místnosti. Ověřte limity senzoru.
- Připojte k Arduinu ještě LEDku. Nastavujte intenzitu LEDky podle toho, jak daleko je překážka od ultrazvukového senzoru. Pro méně než 2cm vzdálenosti bude intenzity LEDky 0%. Pro více než 30cm bude intenzita 100%. Mezi těmito hodnotami se bude intenzita LEDky plynule měnit. Použijte funkci analogWrite() a map() z předešlých hodin.