PRA
Krokový motor
Dalším zařízení, které si zkusíme řídit Arduinem bude krokový motor. V našem případě malý unipolární krokový motor 28BYJ-48.
Schema zapojení, princip funkce
Motor 28BYJ-48 je unipolární krokový motor se čtyřmi cívkami uspořádanými do dvou sekcí. Každá sekce má střední odbočku připojenou na 5V. Když připojíme jeden z konců cívky k zemi, začne cívkou procházet proud, což vytvoří magnetické pole. Interakce tohoto pole s magnetickým polem permanentního magnetu v rotoru způsobí pootočení motoru o jeden krok. Postupným přepínáním napájení mezi jednotlivými cívkami dochází k rotaci motoru krok za krokem
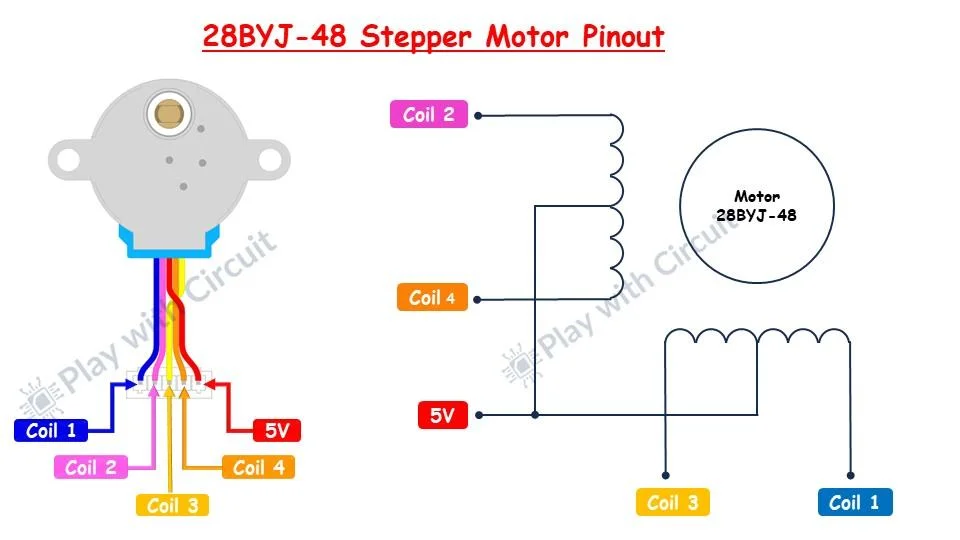
Zdroj obrázků: https://playwithcircuit.com/28byj48-stepper-motor-arduino-tutorial/
Zdroj obrázku: https://www.seeedstudio.com/blog/2019/03/04/driving-a-28byj-48-stepper-motor-with-a-uln2003-driver-board-and-arduino/
Převodovka
Pro dosažení vyššího momentu a jemnějšího řízení polohy je motor vybaven převodovkou s přibližným převodovým poměrem1:64, tedy pro jedno plné otočení výstuponí hřídele je potřeba přibližně 64 otáček motoru.
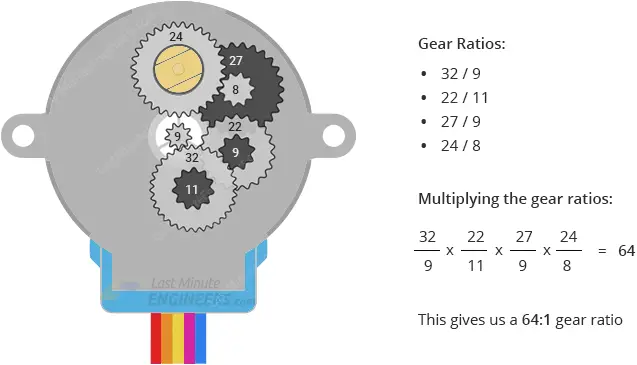
Zdroj obrázků: https://lastminuteengineers.com/28byj48-stepper-motor-arduino-tutorial/
Driver ULN2003
Protože motorem teče příliš velký proud na to, abychom ho řídilo piny Arduina napřímo, použijeme driver pro krokový motor. Ten nám poslouží jako výkonový spínač.
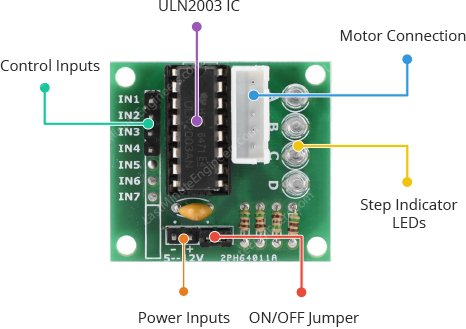
Zdroj obrázků: https://lastminuteengineers.com/28byj48-stepper-motor-arduino-tutorial/
#include <Stepper.h>
//define Input pins of the Motor
#define OUTPUT1 7 // Connected to the Blue coloured wire
#define OUTPUT2 6 // Connected to the Pink coloured wire
#define OUTPUT3 5 // Connected to the Yellow coloured wire
#define OUTPUT4 4 // Connected to the Orange coloured wire
// Define the number of steps per rotation
const int stepsPerRotation = 2048; // 28BYJ-48 has 2048 steps per rotation in full step mode as given in data sheet
// Initialize the stepper motor with the sequence of control pins OUTPUT1, OUTPUT3, OUTPUT2, IN4
// OUTPUT1 and OUTPUT3 are connected to one coil and OUTPUT2 and OUTPUT4 are connected to one Coil
Stepper myStepper(stepsPerRotation, OUTPUT1, OUTPUT3, OUTPUT2, OUTPUT4);
void setup() {
// Set the speed of the motor in RPM (adjust as needed)
myStepper.setSpeed(15); // 15 RPM
}
void loop() {
// Rotate in One Direction and complete one complete rotation i.e 2048 steps
myStepper.step(stepsPerRotation);
delay(1000); // Delay between rotations
// For Rotation in opposite direction provide the variable to the parameter with negative Sign
myStepper.step(-stepsPerRotation);
delay(1000); // Delay between rotations
}
Úkoly
- Připojte k Arduinu krokový motor a otáčejte čtvrt otáčky doleva a půl otáčky doprava.
- Přidejte ještě tlačítko. Při držení tlačítka se bude motor točit doleva, pokud tlačítko není stisknuto tak doprava.