MIT
Ultrazvukový senzor vzdálenosti
S ultrazvukovým senzorem vzdálenosti HC-SR04 jsme už pracovali v rámci předmětu Praxe. Pro měření času, který potřebovala ultrazvuková vlna k cestě k překážce a zpět, jsme v Praxi používali funkci pulseIn(). V předmětu MIT si ale ukazujeme práci s procesorem od základu, proto nepoužijeme hotovou funkci z knihovny, ale pro měření času použijeme čítač/časovač.
Princip senzoru
Senzor funguje tak, že po aktivaci měření 10us pulzem na Trig pinu vyšle krátký ultrazvukový impulz a nastaví Echo pin do log. 1. Ve chvíli, kdy se k senzoru vrátí odražená vlna, nastaví Echo pin do log. 0. Proto pomocí délky pulzu na pinu Echo můžeme určit vzdálenost překážky.
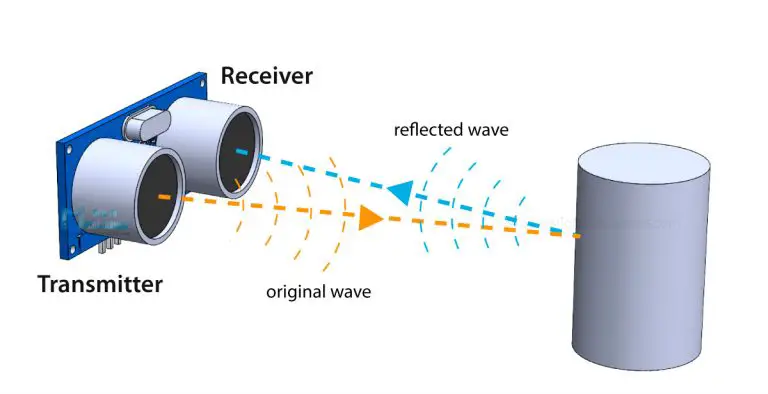
Zdroj obrázku: https://howtomechatronics.com/tutorials/arduino/ultrasonic-sensor-hc-sr04/
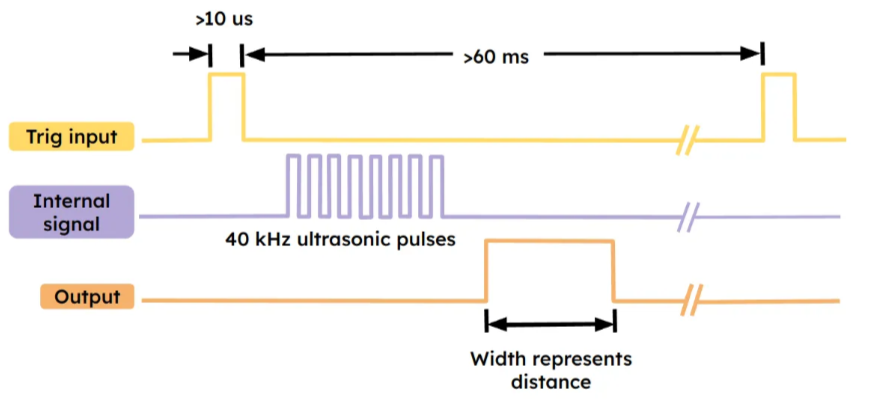
Zdroj obrázků: https://medium.com/@robotamateur123/understanding-ultrasonic-sensor-e3791f883061
Zapojení
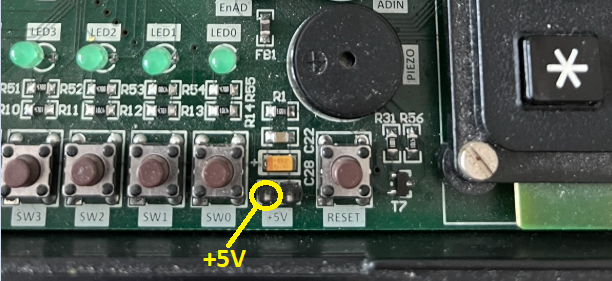
Kromě +5V napájení a GND musíme čidlo připojit ke dvěma libovolným pinům mikroprocesoru. Pin Trig slouží ke spuštění měření (vyslání ultrazvukového pulzu), musíme jej tedy v mikroprocesoru nastavit jako výstup. Pin Echo je výstup senzoru (tedy z pohledu mikroprocesoru vstup), na kterém senzor generuje puls, jehož délka odpovídá době od vyslání signálu do návratu odražené vlny.

5V pro napájení čidla najdete na přípravku například zde:
Úkoly
1. Připojte k výukovému přípravku ultrazvukový senzor. Zvolte si piny, kam zapojíte signály Trig a Echo. Správně je nakonfigurujte - Echo jako vstup, Trig jako výstup.
2. Napište program, který jednou za sekundu vygeneruje 10us pulz na pin Trig. Jak manipulovat s jednotlivými bity portu najdete zde. Ověřte logickým analyzerem, jak vypadají průběhy na pinu Trig a pinu Echo.
3. Dále potřebujeme měřit co nejpřesněji čas, po který je pin Echo v log. 1 (tedy čas od vyslání ultrazvukové vlny do návratu jejího odrazu. K tomu použijeme časovač v režimu Normal. Vyberte vhodnou hodnotu předděličky (spočítejte, nebo s logickým analyzerem změřte, jaký rozsah času budeme potřebovat). Hodnoty předděličky najdete v lekci s časovačem.
Důležité registry pro časovač:
TCNT1 = 0; // vynulování čítače (TCNT1 je čítací registr)
TCCR1A = 0; // normální režim
TCCR1B = ???; // nastavení předděličky a spuštění časovače
TCCR1B = 0; // zastavení časovače
4. Přidejte navíc LCD displej a zobrazujte na něm délku pulzu na Echo pinu.
5. Naměřenou hodnotu na displeji zobrazujte v milimetrech. Pozor, pokud pro výpočet používáte desetinná čísla (např. násobíte 0.34) tak překladač automaticky číslo přetypuje na typ s desetinnou čárkou (float nebo double). Pokud chceme výsledek zobrazit na LCD displeji pomocí formátovacího znaku %d, musíme číslo přetypovat na integer např: int vysledek = (int)(delka*0.34).
6. Pomocí LED diod indikujte vzdálenost v krocích po 10 cm: 0–10 cm → 1 LED, 10–20 cm → 2 LED, …, 90 cm a více → 10 LED.
7. Pokud je vzdálenost nižší než 10cm, zapněte bzučák (na kterém pinu je zapojen najdete ve schematu, součástka s označením Bz1).