PRA
Krokový motor
Cíle lekce
- Pochopit princip fungování krokového motoru
- Řídit pohyb krokového motoru jak ručně, jak pomocí mikrokontroleru
- Vytvořit si vlastní funkce pro ovládání motoru
Schema zapojení, princip funkce
Motor 28BYJ-48 je unipolární krokový motor se čtyřmi cívkami uspořádanými do dvou sekcí. Každá sekce má střední odbočku připojenou na 5V. Když připojíme jeden z konců cívky k zemi, začne cívkou procházet proud, což vytvoří magnetické pole. Interakce tohoto pole s magnetickým polem permanentního magnetu v rotoru způsobí pootočení motoru o jeden krok. Postupným přepínáním napájení mezi jednotlivými cívkami dochází k rotaci motoru krok za krokem
Zdroj obrázku: https://www.seeedstudio.com/blog/2019/03/04/driving-a-28byj-48-stepper-motor-with-a-uln2003-driver-board-and-arduino/
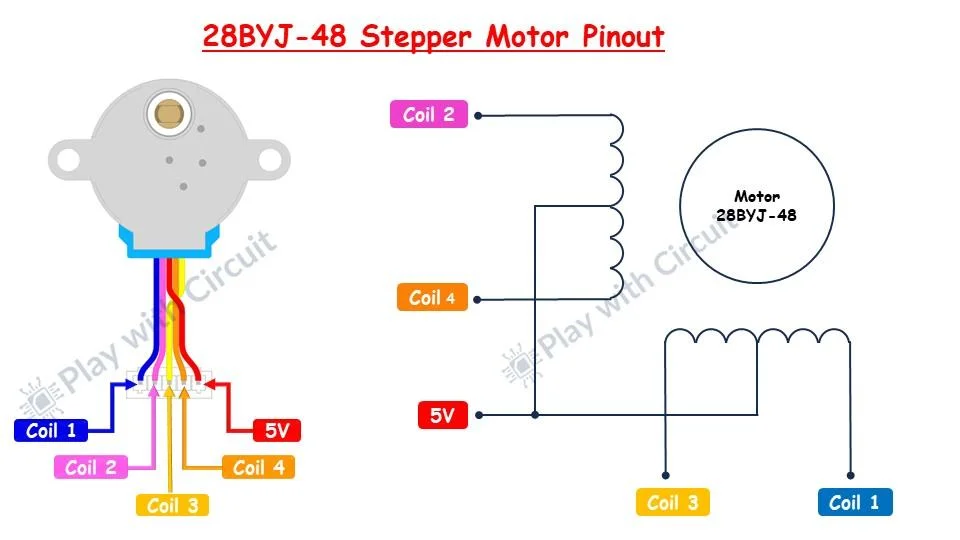
Zdroj obrázků: https://playwithcircuit.com/28byj48-stepper-motor-arduino-tutorial/
Převodovka
Pro dosažení vyššího momentu a jemnějšího řízení polohy je motor vybaven převodovkou s přibližným převodovým poměrem 1:64, tedy pro jedno plné otočení výstupní hřídele je potřeba přibližně 64 otáček motoru.
Podle datasheetu odpovídá u motoru 28BYJ-48 v režimu plného kroku každý krok otočení o 11,25°. To znamená, že na jednu otočku je 32 kroků (360°/11,25° = 32).
Uvnitř motoru je navíc převodovka s převodem 64:1. Výsledkem je 2048 kroků na jednu otáčku (32×64).
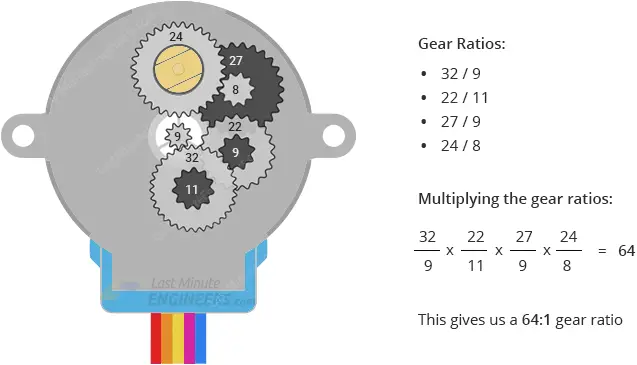
Zdroj obrázků: https://lastminuteengineers.com/28byj48-stepper-motor-arduino-tutorial/
Konstrukce
Jak vypadá motor uvnitř můžete vidět zde.
Driver ULN2003
Protože motorem teče příliš velký proud na to, abychom ho řídilo piny Arduina napřímo, použijeme driver pro krokový motor. Ten nám poslouží jako výkonový spínač.
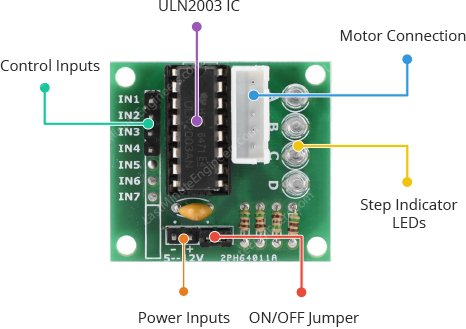
Zdroj obrázků: https://lastminuteengineers.com/28byj48-stepper-motor-arduino-tutorial/
Úkoly
- Připojte ke krokovému motoru pouze napájení (zatím nezapojujte piny IN1-4). Vezměte si do ruky vodič male-to-male, jeden konec připojte na 5V a druhým koncem přejíždějte po pinech IN1-4. Zkuste tímto způsobem motor rozpohybovat na jednu a na druhou stranu.
- Až zjistíte, jak motorem pohybovat ručně, připojte piny IN1-4 k Arduinu a vytvořte program, který bude otáčet motorem. Piny ovládejte pomocí funkce
digitalWrite(), nezapomeňte vybrané piny nastavit jako výstupy. - Zopakujte si, jak se tvoří vlastní funkceVytvořte si funkce
stepForward(int numSteps)- točí motorem po směru hodinových ručiček astepBackward(int numSteps)- točí motorem proti směru hodinových ručiček. Argumentint numStepsbude udávat, o kolik kroků se má motor otočit. - Pomocí funkcí z předchozího úkolu točte motorem střídavě čtvrt otáčky po směru a půl otáčky proti směru hodinových ručiček. Pokud jste funkce vytvořili správně, 2048 kroků by mělo způsobit jednu plnou otáčku hřídele.
- Prostudujte různé způsoby řízení krokového motoru například tady. Zkuste pak použít takový způsob, kterým dosáhnete co nejvyšší rychlosti otáčení motoru.